
3D-Druck-Tutorial, Teil 1: 3D-Scan mit Open-Source-Software
Abgetastet
Der Weg vom realen Objekt zum 3D-Modell und einer 3D-gedruckten Kopie kann aufwendig und teuer sein. Freie Hard- und Softwarekomponenten können den kompletten Workflow abdecken.
Nicht nur auf engagierte Hobbyisten üben 3D-Drucker eine große Faszination aus. Für den Erfinder und Unternehmer ist 3D-Prototyping eine willkommene Option, Proofs of Concept und Vorführgeräte in Eigenregie oder für Partner herzustellen und weiterzuentwickeln, lange bevor die Serienreife des Produkts erreicht ist.
Allerdings dürfte das Bauen von Gegenständen mit dem 3D-Drucker in den wenigsten Fällen schneller vonstattengehen als mit traditionellem Werkzeug und Holz oder Metall – gerade komplexe Formen erfordern mitunter eine Druckzeit von mehreren Tagen und bergen das Risiko, im letzten Moment zu scheitern. Aber immerhin muss der Konstrukteur in der Phase des eigentlichen Druckens nicht mehr selbst aktiv werden.
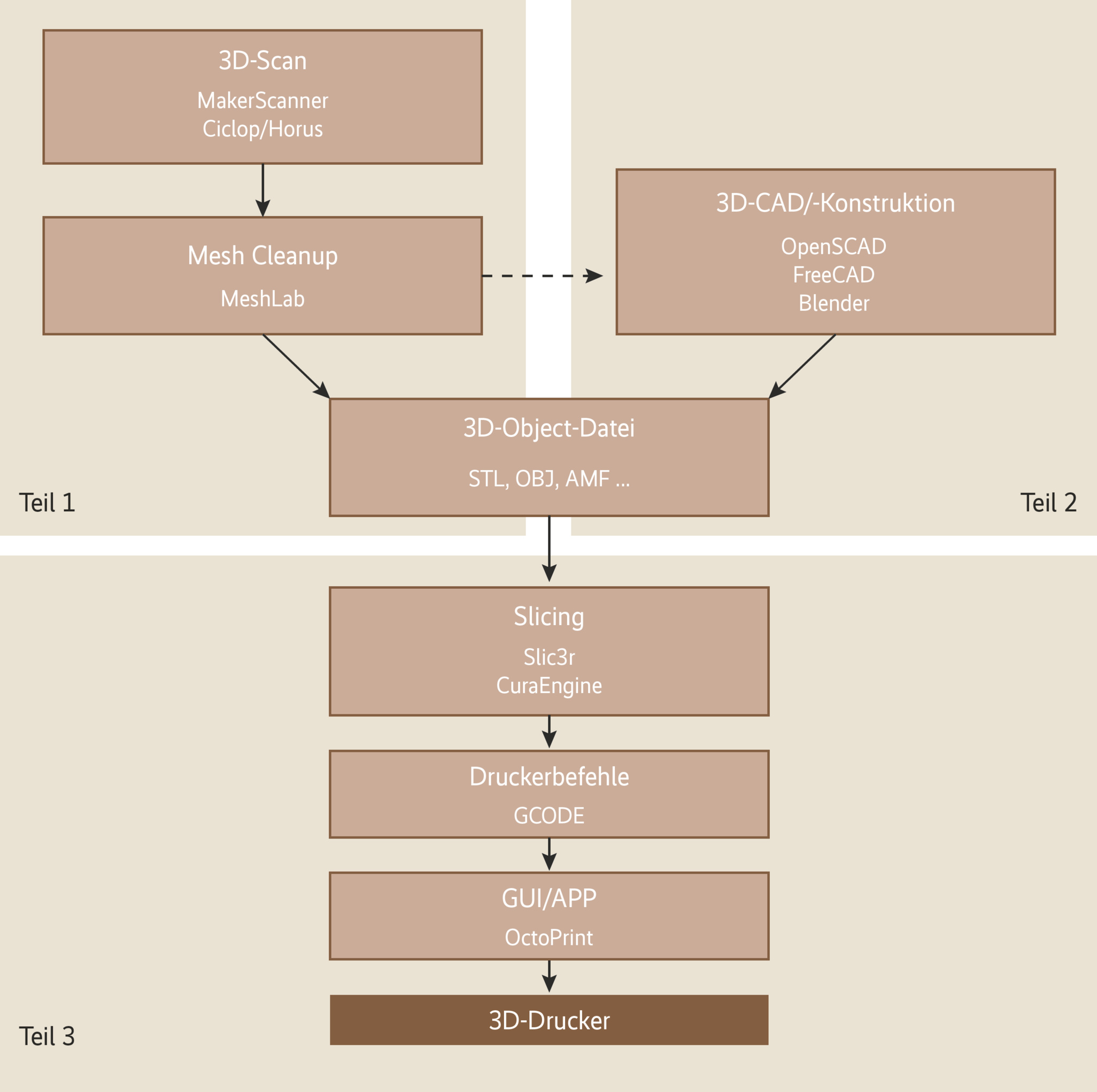
Dieses dreiteilige Tutorial beleuchtet die Arbeitsschritte der 3D-Modellierung mithilfe für viele Betriebssysteme frei verfügbarer Open-Source-Software und gibt eine Einführung in die Komponenten des in Abbildung 1 gezeigten Workflows.
Vom realen Objekt zum Modell – 3D-Scan
Auf das kreative eigene Erstellen von 3D-Modellen wird der zweite Teil dieses Tutorials ausführlich eingehen. Zunächst soll das Erfassen und Scannen realer Gegenstände sowie das Umwandeln in Volumenmodelle im Vordergrund stehen.
Fotos, selbst die bekannten Photosphere-Varianten mit „3D-View“, sind grundsätzlich zweidimensional (x-y-Koordinaten), das heißt, die Tiefeninformation (z) fehlt, was bei einer einzigen Kamera beziehungsweise geringem Abstand zwischen zwei Kameras durchaus verständlich ist. Allenfalls lässt sich die Tiefeninformation noch bei Graustufenbildern aus der Helligkeit jedes Pixels extrahieren, was zur Oberflächenbildung für sogenannte Lithophane (auf die der Konstruktions-Teil noch eingehen wird) dienen kann.
Als Basis für ein echtes 3D-Volumenmodell benötigt man, als Ergebnis eines 3D-Scans, zunächst eine Punktwolke. Das sind x-y-z-Koordinaten, aus denen sich mittels einiger mathematischer Operationen die Außenfläche eines geschlossenen Körpers berechnen lässt.
Erste Experimente: MakerScanner, Ciclop & Horus
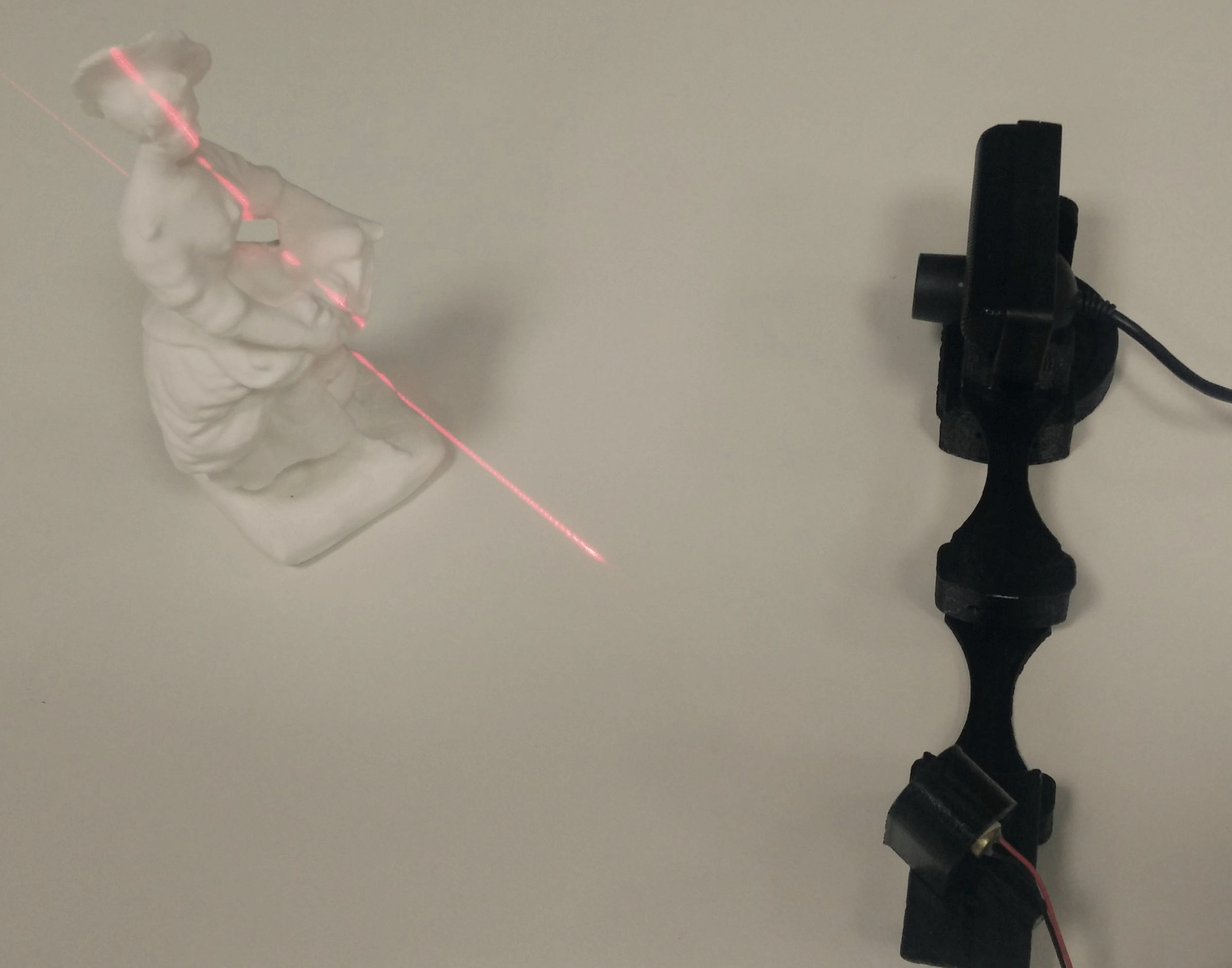
Mit einem Materialeinsatz von unter 50 Euro ist der MakerScanner vermutlich das preisgünstigste und lehrreichste (nebenbei eines der ersten) DIY-Scanner-Projekt, das dabei hilft, das Verfahren zu verstehen – gleichzeitig aber auch das unkomfortabelste. Das System generiert mit einer USB-Webcam und einem Linearlaser durch manuelles Verändern der Oberflächenausleuchtung eine Punktwolke. Eine professionelle Variante beschreibt der Kasten „Zum Vergleich: David Scanner“.
Zumindest einen Vorteil gegenüber leichter automatisierbaren Verfahren hat der MakerScanner: Die Objekte können auch mal etwas größer sein. Baut man sie weiter entfernt von der Kamera auf, könnte sich – in Abhängigkeit vom Aufnahmewinkel und der Reichweite des Linearlasers – bei möglichst dunkler Umgebung sogar eine Person im Profil scannen lassen. Da MakerScanner aber nur von einer Seite aufnimmt, ist der Aufwand für die Nachbearbeitung – mit dem Entfernen von Pixeln aus der Umgebung oder gar dem Zusammensetzen mehrerer Scans – ziemlich hoch. Der Abschnitt „Nachbearbeiten der Punktwolke mit MeshLab“ geht später genauer auf die Nachbearbeitung ein.
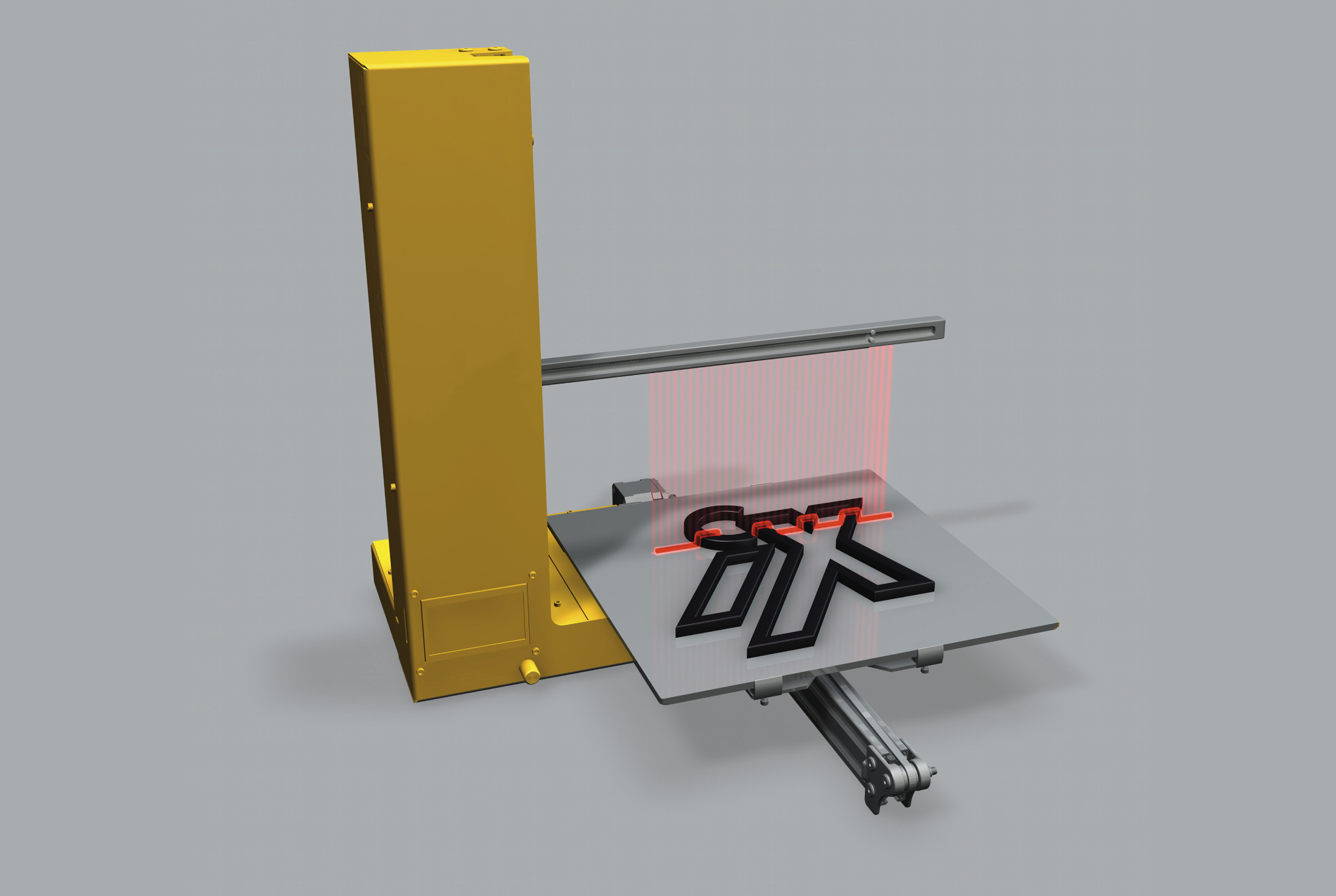
Um die Oberfläche eines Objektes in regelmäßigen Abständen zu scannen, kommt bei kleineren Objekten gerne ein Drehteller zum Einsatz – per Software gesteuert und mit dem Auslöser zur Bildaufnahme gekoppelt. Dies erleichtert das beim MakerScanner etwas wackelige manuelle Abtasten und erlaubt auch einen Rundum-Scan. Auch bei dieser Methode enthält die Punktwolke Löcher. Die können später beim Erzeugen geschlossener Volumina Probleme bereiten, da die auf dem Drehteller aufliegende Unterseite der Objekte natürlich nicht erfasst wird und folglich dort Punkte fehlen.
Ebenfalls ein Projekt zum Selbstbau, hier sogar mit vielen 3D-druckbaren Teilen, ist der Ciclop, ein Open-Source-Projekt von BQ. Das Gerät bietet neben der Webcam zwei Linearlaser, die das Scannen beschleunigen beziehungsweise die Oberflächenabdeckung vervollständigen sollen. Diverse Anbieter haben die Hardware beinahe zum Selbstkostenpreis inklusive der gedruckten Teile, Motor und Arduino-Board für rund 100 Euro im Portfolio.